VPS : Positioning System
-
Overview
The VEMCO Positioning System (VPS) is an affordable, underwater acoustic fine-scale positioning system, capable of providing metres level position resolution of many animals simultaneously.
There is no limit to the amount of area a VPS can cover and it can typically run unattended for up to a year at a time. The VPS system is based on VEMCO’s standard off-the-shelf receivers used in numerous presence / absence studies worldwide.
The system consists of underwater acoustic transmitters and receivers that are deployed by you, and a receiver data processing service provided by VEMCO.
VEMCO will work with you to design a system layout in accordance with a set of design guidelines. You then deploy your system and collect receiver data periodically. Receiver positions can be measured using a handheld GPS unit.
On a periodic basis, you collect your receiver data, and send it to VEMCO for analysis. As a result of this analysis, VEMCO will provide interim calculated positions, and may recommend changes to the design of the system to address performance issues. At the end of the study, once all receiver data has been collected, VEMCO will provide a final report and calculated positions.
For most studies, VEMCO expects position accuracy similar to that provided by the GPS standard positioning service: 95% of positions within a 15-metre error circle. VEMCO considers this a conservative estimate, based on results from field studies conducted to date. Depending on the specifics of the study, significantly better accuracy is possible.
For more details, see Downloads section.
-
Gallery

-
Frequently Asked Questions
What is a VPS Specification?
Why is temperature, salinity & depth data important?
Why do we want GPS measurements both after deployment and before retrieval?
Why do we want multiple GPS measurements of the same station?
What is a synchronization tag (synctag)?
What are reference tags and why would I need them?
Why can’t I use a fixed delay tag as a synctag?
Why do receivers need to be spaced more closely for a VPS study than for a presence/absence study?
Why is it important that I initialize receivers just before deployment?
What is HPE?
What is a derived position for a station?
How do you know one of my stations moved?
What is a VPS Specification?
The VPS Specification is a Microsoft Excel spreadsheet that is the primary tool for communicating VPS deployment information between you and Vemco. It is essential for the analysis of a VPS dataset. At the beginning of a study Vemco will provide you with a template for you to use.
Why is temperature, salinity & depth data important?
The accuracy of the positions calculated by the VPS depends on the accuracy of the system’s knowledge of the speed of sound in water, which is primarily dependent on water temperature and salinity. It can range between approximately 1400 m/s and 1560 m/s.
In addition, in order to estimate positioning error, the system needs to know what ranges of temperature, salinity and transmitter depth to expect.
Why do we want GPS measurements both after deployment and before retrieval?
GPS measurements should be taken when the station is deployed as well as when it is retrieved. These two (or more) measurements will help determine how much, if any, movement of the station occurred from the time the station was deployed to the time the data was offloaded.
Why do we want multiple GPS measurements of the same station?
You are encouraged to take multiple GPS measurements of a station, whether or not the station has been intentionally moved, at different times throughout the study period. This usually reduces position error.
GPS error has a tendency to be spatially correlated over short periods of time, but more random over longer periods of time. By increasing the time between marking successive GPS waypoints for a receiver or synctag, the effects of short-term GPS biases are reduced.
What is a synchronization tag (synctag)?
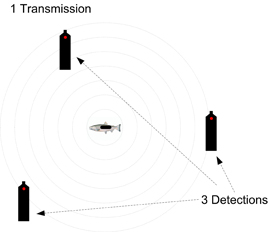
Over time, receiver clocks drift and lose/gain as much as 4 seconds per day due to crystal oscillator manufacturing variations. For an animal to be positioned in a VPS array, its tag transmission must be detected simultaneously on at least 3 receivers. Because receiver clocks in a VPS array drift at different rates, time synchronization is necessary to correct for the difference between receiver clocks (called “clock skew”). This time correction allows animal tag detections at different receivers to be linked back to a common transmission, and arrival time differences to be calculated.
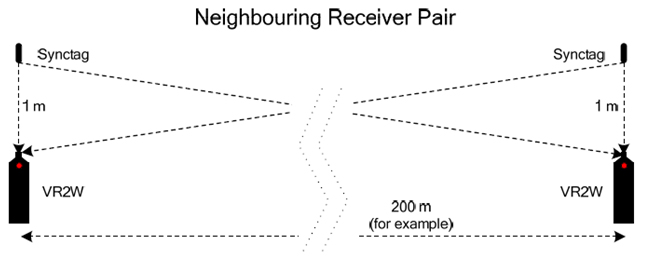
Time synchronization in a VPS array is accomplished by the use of synchronization tags, or synctags. Synctags are random delay transmitters situated in known locations throughout the array. A typical system deployment would place a synctag 1 metre above each receiver, as shown in the figure below.

When a synctag transmission is detected at two different receivers, the difference between the detection times comprises two components: the clock skew, and the propagation time difference of the synctag signal. The propagation time difference is known, since the locations of both receivers and the synctag are known, and the transmission propagation speed is known. The clock skew is determined by eliminating the propagation time difference component.
What are reference tags and why would I need them?
Reference tags are transmitters placed between receivers within the array in known measured locations to measure system performance. These tags are used to determine the detectability of animal tags of similar signal power and to measure the potential position error in particular areas of the array. Reference tags are needed to sample different types of receiver triangle geometry in the array for the purposes of estimating potential error in animal positions. Without reference tags, error estimates for animal tag positions may be unnecessarily pessimistic.
Why can’t I use a fixed delay tag as a synctag?
Synctags are used to determine the clock skew (difference in receiver clock times) between pairs of receivers. To do this, it is necessary to determine which detections correspond to the same synctag transmission; this is accomplished by matching patterns of synctag transmissions randomly spaced in time detected at two different receivers. The figure below shows an example of random delay synctag transmissions detected at two different receivers. The pattern of detections on each receiver is uniquely matched in time. In this example, the clock skew between the receivers (distance between the vertical lines) is approximately 4 seconds.

If synctag delays are fixed (nonrandom), then detections at different receivers cannot be linked to the same transmission, since the transmission pattern does not change over time. With fixed delay synctags, detection patterns at each receiver could line up in multiple ways.
Why do receivers need to be spaced more closely for a VPS study than for a presence/absence study?
In order for a transmission to be positioned by the VPS, it must be detected on at least 3 receivers. For this reason, receiver detections ranges must overlap. Since detection ranges vary with poor weather, changes in temperature, thermoclines etc., receivers need to be closer together to get solid detections in all conditions.
Why is it important that I initialize receivers just before deployment?
Initializing all receivers just prior to deployment is important for two main reasons:
- The initialization process clears the memory of the receiver, thus allowing as much relevant detection data to be stored during the study period as possible.
- The initialization process resets the receiver’s clock to match the clock on the PC. Initializing all the receivers in the system insures that all the receiver clocks are synched to each other, which is necessary for certain time correction procedures used during analysis.
What is HPE?
The primary purpose of HPE is to provide a reliable relative measure of the error potential of a calculated position. HPE estimates are calculated in part from the ranges of water temperature, depth, and salinity specified in the VPS specification, the geometry of the tag and detecting receivers for specific transmissions, and information obtained by analyzing the error of VPS-calculated positions for synctags and reftags.
What is a derived position for a station?
A derived position for a station is one that was calculated by Vemco during the data analysis process, and replaces the GPS measurements for that station. Derived positions are used when GPS error is observed to be high, or when stations move unexpectedly. They are calculated using the detection data from the synctags and reference tags in the system.
How do you know one of my stations moved?
Analysis of synctag and reftag timing data is done that indicates when there is relative movement between a synctag or reftag and a receiver. Further analysis is used to determine which device has moved relative to the others, and it will be assigned a new derived position.
-
Downloads